Human operations beyond LEO by the end of the decade: An affordable near-term stepping stoneby Harley Thronson, Dan Lester, and Ted Talay
|
| Productive, long-duration human operations in cislunar space are likely prerequisites for human travel beyond the vicinity of the Earth-Moon system. |
For historical completeness, it was probably Arthur C. Clarke in A Fall of Moondust (1961), who first proposed operations from habitats at the first and second Earth-Moon Lagrange points. Robert Farquhar in 1971 (NASA TN D-6365) is generally recognized as producing the first detailed architecture for extended human operations at Earth-Moon L1 or L2 sites. Farquhar’s libration-point architecture included long-duration habitats, on-orbit depots and tugs, and control from orbit of robotic systems on the surface. For the purpose of this paper, the first and second Earth-Moon libration points are equivalently useful, hence we will use the combined designation “L1,2”. Moreover, robotic or human operations at one venue can relatively easily transfer to the other, if desired, as demonstrated by the current NASA ARTEMIS mission.
Recently, Lester and Thronson (Space Policy, submitted) pointed out that the E-M L1,2 orbits are within what they refer to as the “cognitive scale of the universe” as seen from the lunar surface; that is, within roughly the round-trip light-travel time where advanced telepresence becomes almost indistinguishable from the experience of being on-site. Consequently, these authors have advocated suitably outfitted habitation in these orbits as starting points for lunar surface exploration. These would be in advance of the difficult and expensive landing of astronaut operators on the lunar surface, at least in the near term. Given the availability of the required technologies, Lester and Thronson assert that near-real time telepresence on the lunar surface can be a major near-term goal for science and human space flight. In conjunction with other goals to be achieved later, telepresence may be one justification for a human operations site at E-M L1,2 as soon as the end of the decade. One can therefore view such an Earth-Moon libration point as being the first, most affordable, important destination that humans should visit beyond LEO (see “First stop for Flexible Path?”, The Space Review, November 30, 2009).
Furthermore, as many authors have pointed out, with modern sensors, tools and effectors, computing systems, and visualization, advanced telepresence should enable a distant operator to readily surpass the experience and accomplishments of a human on site. In particular, an astronaut’s experience of the environment is severely compromised by being encased within a spacesuit. (We emphasize the difference in our usage here of the term “telerobotics”, which may be practiced over vast distances, versus “telepresence”, which requires a relatively low latency.) In this context, Lester and Thronson in their paper contrast human space flight with human space exploration.
To enable a long-duration “Gateway” at an Earth-Moon libration point by the end of the decade, suitable launch vehicles must be available in the near term. In their article here last year, Thronson and Talay described a 2005 habitat design made possible by a heavy lift vehicle thought at that time to be available within several years. Recently, our team has developed a design, which we outline here, made possible by near-future variants of Delta 4 Heavy EELVs.
| With modern sensors, tools and effectors, computing systems, and visualization, advanced telepresence should enable a distant operator to readily surpass the experience and accomplishments of a human on site. |
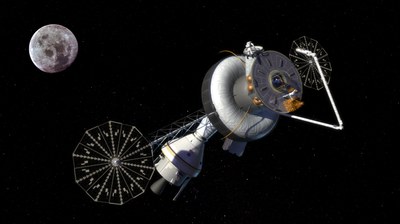
Should it be a priority for NASA’s human space flight program to affordably extend human operations beyond LEO within a decade, the decision may be made to rely upon existing or near-future EELVs. For our current “Gateway” design, we assessed the capability of a Delta 4 Heavy, which, upgraded using RS-68A engines, has a design mass-to-LEO payload capacity of 28 metric tons. This capability is only somewhat less than that of the vehicles assumed a decade ago by the DPT for their extensive assessment of a libration-point “Gateway”. That similarity has permitted our team to use the earlier work as a point-of-departure for which “deltas” in mass and volume in the DPT design would permit our resulting current “Gateway” to be accommodated by the launch vehicle that we assessed. The resulting habitat that we designed is shown in the figure that opens this essay. It has a total mass of 17.5 metric tons (including a 30 percent margin) and a calculated pressurized volume of 170 cubic meters. For comparison, this volume is roughly 20 percent of the volume of ISS and achievable without the complexities of assembly via many launches.
In our “concept of operations,” a first Delta 4 Heavy launch to LEO carries a fuel-laden tanker with a capacity of 25 metric tons. It will wait until a second Delta 4 Heavy launch carries the unoccupied “Gateway” to a LEO rendezvous with the propellant tanker. This tanker then refuels the Delta cryogenic second stage (DCSS). This refueling is sufficient to allow the DCSS to propel the habitat and an attached insertion stage towards the L1,2 destination. An ATK Star 63F motor is then used for insertion into the libration-point orbit. Details of this and other designs are at www.futureinspaceoperations.com.
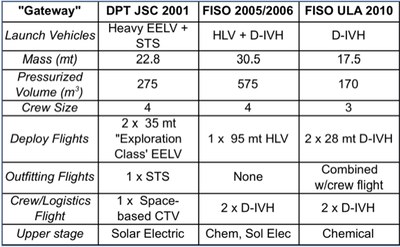
A summary chart of basic characteristics of the three published designs for libration-point “Gateways” is shown below: the 2001 DPT design based on the Shuttle (STS) and a pair of Delta 4 35-mt “exploration-class” vehicles; the 2005/2006 FISO design based on a 95-metric-ton heavy lift vehicle; and our current 2010 design based on an upgraded 28-metric-ton Delta 4 Heavy. Our latest design is the least massive and has the smallest volume of the three studied habitats, a result of our adoption of Delta 4 Heavy variants with capacities expected to be available within about two years. This directly reflects our goal to enable an affordable major human operations capacity beyond LEO before the end of the decade.
 |
Subsequent pairs of Delta 4 Heavy vehicles will be required for each of the combined astronaut/outfitting flights to the “Gateway”: we assumed for this assessment, although did not study in detail, four three-person missions to the habitat annually, each one lasting 60–90 days. This “beachhead Gateway” is intended to operate for several years. An upgrade path could then include connecting one or more additional expandable modules together over time to build up an increasingly capable and capacious operations site.
| Operating with humans from within a “Gateway” will simultaneously enable inestimable near-term experience in long-duration human operations of all kinds beyond LEO. |
Numerous authors have identified long-term activities made possible by sustained operations at E-M L1,2 sites. For near-term operations, we are assessing this dual-EELV “Gateway” for a pair of major goals: (1) development of next-generation on-orbit capabilities (i.e., more compact, higher-reliability, lower power) developed originally on ISS and (2) low-latency robotic telepresence on the lunar surface for science goals and in advance of human surface operations. The former goal could, of course, be demonstrated by a “Gateway” in LEO, although the latter requires a location close enough to a lunar surface robot so that the latency in operation is nearly indistinguishable from being on-site. Our team is, at present, developing a layout for the interior of this “Gateway” and basic systems requirements for “immersive telepresence” of multiple robots operating over an entire lunar hemisphere visible from the Earth-Moon L1 or L2 venue. (Interestingly, Clarke’s A Fall of Moondust a half-century ago recognized the importance of latency in lunar surface exploration by contrasting operations from E-M L1 with that from the Earth’s surface: “The soilphysics expert on Earth was at a disadvantage, for owing to the finite speed of radio waves, he would always be a second and a half in arrears, and by the time his [communication] could get to the Moon, almost three seconds would have passed. Everyone waited for the three seconds, which, as always, seemed very much longer.”)
Affordability has emerged as an overriding issue in the current political environment for human space flight. The DPT team in 2002 calculated a total cost for that earlier, larger version of the “Gateway”: about $1.6 billion (2010 dollars). Their estimate was limited only to the habitat itself and did not include significant other components of an operational system, such as launch vehicles, a likely technology development program in advance of deployment, extended operations, and the costs for astronaut flights to the proposed E-M L1,2 site. The design that we summarize here does not yet have the fidelity of the earlier DPT habitat. However, as we derived our current design from that earlier work, it is reasonable to estimate that our EELV-based concept would cost less than approximately $10 billion. This includes plausible, albeit approximate, estimates for major items not included in the DPT costing.
Relevant to our discussion, Spudis and Lavoie recently described a step-by-step architecture for lunar surface exploration, beginning with an extensive program of telerobotic operation from the Earth several years in advance of human missions to the lunar surface. It may be possible to enhance their architecture by including libration point-enabled support operations at some time. For example, telepresence as advocated by Lester and Thronson, in contrast with the longer delays intrinsic to Earth-controlled telerobotics, may be preferred for many operations. In this respect, “Gateway”-based robotic operations are attractive within the context of a Spudis and Lavoie-type lunar surface architecture. Moreover, operating with humans from within a “Gateway” will simultaneously enable inestimable near-term experience in long-duration human operations of all kinds beyond LEO.